- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artykuł mający na celu zrozumienie różnicy między silnikami krokowymi a serwomechanizmami i serwomotorami
I. Różnice pomiędzy silnikami krokowymi a serwami i serwomotorami
Silnik krokowy: jest to sygnał impulsu elektrycznego powodujący przemieszczenie kątowe lub przemieszczenie liniowe elementów silnika krokowego z elementem sterującym w otwartej pętli. Mówiąc najprościej, sterowanie kątem i liczbą zwojów opiera się na sygnale impulsu elektrycznego. Dlatego też w celu określenia stopnia rotacji polega wyłącznie na sygnale impulsowym. Ponieważ nie ma czujnika, kąt zatrzymania może się różnić. Jednak precyzyjny sygnał impulsowy minimalizuje odchylenie.
Serwosilnik: polegaj na obwodzie sterowania serwo, aby kontrolować prędkość silnika, poprzez czujnik, aby kontrolować położenie obrotowe. Zatem kontrola położenia jest bardzo precyzyjna. Prędkość obrotowa jest również zmienna.
Serwo (serwo elektroniczne): Głównym elementem serwa jest silnik serwo. Zawiera obwód sterujący serwomotoru + zestaw przekładni redukcyjnej. Aha, serwomotor nie ma ustawionej przekładni redukcyjnej. A serwo ma zestaw przekładni redukcyjnej.
W przypadku serwa ograniczającego, określenie kąta skrętu ramienia steru odbywa się za pomocą potencjometru znajdującego się pod wałem wyjściowym. Sterowanie sygnałem serwa to sygnał z modulacją szerokości impulsu (PWM), w przypadku którego mikrokontroler może z łatwością wygenerować ten sygnał.
II. Podstawowa zasada silnika krokowego
Jak to działa:
Zwykle wirnik silnika jest magnesem trwałym i gdy prąd przepływa przez uzwojenia stojana, uzwojenia stojana wytwarzają wektorowe pole magnetyczne. To pole magnetyczne spowoduje obrót wirnika o kąt, tak że kierunek pary pól magnetycznych wirnika będzie taki sam, jak kierunek pola magnetycznego stojana. Kiedy wektorowe pole magnetyczne stojana obraca się o kąt. Wirnik również obraca się o kąt pod wpływem tego pola magnetycznego. Na każdy wejściowy impuls elektryczny silnik obraca się o jeden krok kątowy do przodu. Jego wyjściowe przemieszczenie kątowe jest proporcjonalne do liczby impulsów wejściowych, a jego prędkość obrotowa jest proporcjonalna do częstotliwości impulsów. Zmieniając kolejność zasilania uzwojeń, silnik odwraca kierunek. Dlatego można kontrolować liczbę i częstotliwość impulsów oraz kolejność zasilania uzwojeń każdej fazy silnika, aby kontrolować obrót silnika krokowego.
Zasada wytwarzania ciepła:
Zwykle spotykane są wszystkie rodzaje silników, wewnętrzne to żelazny rdzeń i cewka uzwojenia. Rezystancja uzwojenia, moc powodują straty, wielkość strat i rezystancję, a prąd jest proporcjonalny do kwadratu, co często określa się jako stratę miedzi, jeśli prąd nie jest standardowym prądem stałym lub falą sinusoidalną, spowoduje również straty harmoniczne; rdzeń ma efekt histerezy wiroprądowej, w zmiennym polu magnetycznym będzie również powodować straty, rozmiar materiału, prąd, częstotliwość, napięcie, co nazywa się stratą żelaza. Straty miedzi i żelaza objawiają się w postaci wytwarzania ciepła, co wpływa na wydajność silnika. Silnik krokowy zazwyczaj dąży do dokładności pozycjonowania i wyjściowego momentu obrotowego, wydajność jest stosunkowo niska, prąd jest na ogół większy, a składowe harmoniczne są wysokie, częstotliwość prądu zmienia się wraz z prędkością i zmianami, więc silniki krokowe zazwyczaj mają sytuację cieplną, a sytuacja jest poważniejsza niż ogólny silnik prądu przemiennego.
III. Konstrukcja steru
Serwo składa się głównie z obudowy, płytki drukowanej, silnika napędowego, reduktora i elementu wykrywającego położenie. Zasada działania polega na tym, że odbiornik wysyła sygnał do serwa, a układ scalony na płytce drukowanej napędza silnik bezrdzeniowy, aby zaczął się obracać, a moc przekazywana jest do wahacza przez przekładnię redukcyjną, a jednocześnie detektor położenia wysyła sygnał z powrotem, aby określić, czy dotarł do pozycjonowania, czy nie. Detektor położenia jest w rzeczywistości rezystorem zmiennym. Gdy serwo się obraca, wartość rezystora odpowiednio się zmieni, a kąt obrotu można poznać, wykrywając wartość rezystora. Ogólnie serwosilnik to cienki drut miedziany owinięty wokół trójbiegunowego wirnika, gdy prąd przepływa przez cewkę, wytwarza pole magnetyczne, a obwód magnesu wirnika wytwarza odpychanie, co z kolei generuje siłę obrotową. Zgodnie z fizyką moment bezwładności obiektu jest wprost proporcjonalny do jego masy, więc im większa jest masa obracanego obiektu, tym większa jest wymagana siła. Aby osiągnąć dużą prędkość obrotową i niskie zużycie energii, serwo jest wykonane z cienkich drutów miedzianych skręconych w bardzo cienki pusty cylinder, tworząc bardzo lekki pusty wirnik bez biegunów, a magnesy są umieszczone wewnątrz cylindra, który jest silnikiem z pustym kubkiem.
Aby dopasować się do różnych środowisk pracy, dostępne są serwa w wersji wodoodpornej i pyłoszczelnej; w odpowiedzi na różne wymagania dotyczące obciążenia istnieją plastikowe i metalowe koła zębate do serwomechanizmów, a metalowe koła zębate do serwomechanizmów mają zazwyczaj wysoki moment obrotowy i dużą prędkość, z tą zaletą, że koła zębate nie będą wyszczerbione z powodu nadmiernych obciążeń. Serwa wyższej klasy będą wyposażone w łożyska kulkowe, dzięki którym obrót będzie szybszy i dokładniejszy. Istnieje różnica pomiędzy jednym łożyskiem kulkowym a dwoma łożyskami kulkowymi, oczywiście dwa łożyska kulkowe są lepsze. Nowe serwa FET wykorzystują głównie FET (tranzystor polowy), którego zaletą jest niski opór wewnętrzny, a zatem mniejsze straty prądu niż w przypadku zwykłych tranzystorów.
IV. Zasada działania serwa
Od fali pwm do obwodu wewnętrznego w celu wygenerowania napięcia polaryzacji, generator stycznika poprzez przekładnię redukcyjną w celu napędzania potencjometru, tak że gdy różnica napięcia wynosi zero, silnik zatrzymuje się, aby uzyskać efekt serwa.
Protokoły dla serwonapędów PWM są takie same, ale najnowsze serwa, które się pojawią, mogą się różnić.
Protokół jest ogólnie następujący: szerokość wysokiego poziomu w zakresie 0,5 ms ~ 2,5 ms w celu sterowania serwomechanizmem w celu obracania się pod różnymi kątami.
V. Jak działają serwomotory
Poniższy rysunek przedstawia obwód sterujący serwosilnika wykonany ze wzmacniacza operacyjnego mocy LM675, a silnik jest serwomotorem prądu stałego. Jak widać na rysunku, wzmacniacz operacyjny mocy LM675 jest zasilany napięciem 15 V, a napięcie 15 V jest dodawane do wejścia w fazie wzmacniacza operacyjnego od LM675 do RP 1, a napięcie wyjściowe LM675 jest dodawane do wejścia serwomotoru. Silnik jest wyposażony w generator sygnału pomiaru prędkości, umożliwiający wykrywanie prędkości silnika w czasie rzeczywistym. Tak naprawdę generator sygnału prędkości jest rodzajem generatora, a jego napięcie wyjściowe jest proporcjonalne do prędkości obrotowej. Napięcie wyjściowe generatora sygnału pomiaru prędkości G jest podawane z powrotem na wejście odwracające wzmacniacza operacyjnego jako sygnał błędu prędkości po obwodzie dzielnika napięcia. Wartość napięcia ustawiona przez potencjometr sterowania prędkością RP1 jest dodawana do wejścia jednofazowego wzmacniacza operacyjnego po podzieleniu napięcia przez R1.R2, co jest równoważne napięciu odniesienia.
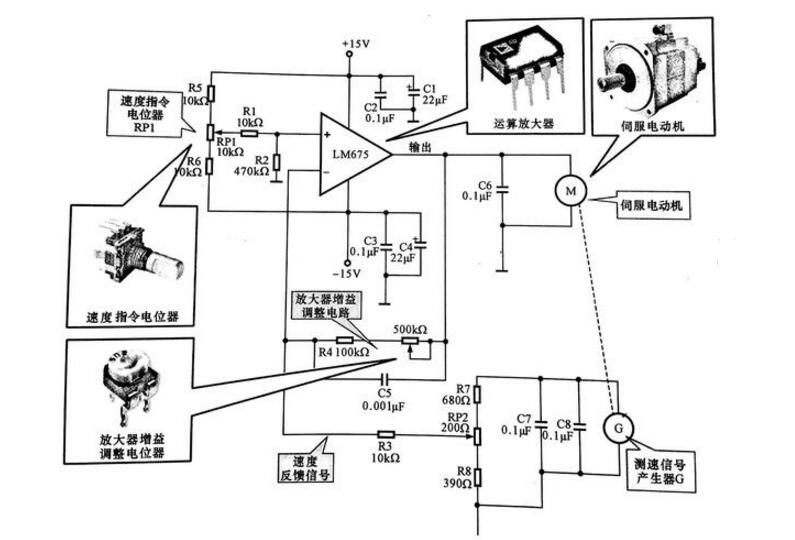
Schemat sterowania serwomotoru
Serwomotor: Oznaczony literą M dla serwomotoru, jest źródłem zasilania układu napędowego. Wzmacniacz operacyjny: oznaczony nazwą obwodu, tj. LM675, jest elementem wzmacniacza w obwodzie sterowania serwo, który zapewnia prąd napędowy dla serwomotoru.
Potencjometr zadawania prędkości RP1: Ustawia napięcie odniesienia wzmacniacza operacyjnego w obwodzie, czyli ustawienie prędkości. Potencjometr regulacji wzmocnienia wzmacniacza RP2: Używany w obwodzie do dokładnego dostrojenia odpowiednio wzmocnienia wzmacniacza i wielkości sygnału sprzężenia zwrotnego prędkości.
Gdy zmienia się obciążenie silnika, zmienia się również napięcie podawane z powrotem na wejście odwrócone wzmacniacza operacyjnego, czyli wraz ze wzrostem obciążenia silnika maleje prędkość obrotowa, a także maleje napięcie wyjściowe generatora sygnału prędkości, tak że maleje napięcie na wejściu odwróconym wzmacniacza operacyjnego, wzrasta różnica między tym napięciem a napięciem odniesienia i wzrasta napięcie wyjściowe wzmacniacza operacyjnego. I odwrotnie, gdy obciążenie staje się mniejsze, a prędkość silnika rośnie, wzrasta napięcie wyjściowe generatora sygnału pomiaru prędkości, wzrasta napięcie sprzężenia zwrotnego dodane do odwróconego wejścia wzmacniacza operacyjnego, zmniejsza się różnica między tym napięciem a napięciem odniesienia, zmniejsza się napięcie wyjściowe wzmacniacza operacyjnego i odpowiednio maleje prędkość silnika, dzięki czemu prędkość obrotowa może zostać automatycznie ustabilizowana na ustawionej wartości.